
Động cơ bước chủ yếu làcác vật dụng điện, hiện đang được sử dụng rộng rãi trong các lĩnh vực công nghiệp bao gồm dùng điều khiển vị trí. Vậy, tinh chỉnh động cơ bước có khó không, làm gắng nào bắt đầu đúng chuẩn? dưới đây, mời các bạn cùng tò mò về khái niệm, nguyên lý hoạt động, những đặc tính tương tự như cách tinh chỉnh và điều khiển động cơ bước sao cho công dụng nhất.
Bạn đang xem: Mạch điều khiển động cơ bước a4988
1. Khám phá khái niệm motor bước
Trước khi tìm hiểu về cách tinh chỉnh và điều khiển động cơ bước, họ cần nắm vững khái niệm bộ động cơ bước là gì? Đâylà 1 một số loại động cơ bao gồm khả năng thay đổi các tín hiệu điều khiển ở dưới dạng những xung điện rời rạc biến hóa thiên kế tiếp nhau thay đổi các chuyển động ở góc cù hoặc các chuyển động của roto. Loại bộ động cơ này có công dụng cố định roto của dòng sản phẩm vào đúng các vị trí đề xuất thiết.
Động cơ cách giúp cố định và thắt chặt roto của sản phẩm vào đúng những vị trí phải thiết
Các thông số cơ bản để chọn lựa được một mạch tinh chỉnh và điều khiển động cơ bước 4 dây tương thích gồm có:
Loại motor gồm những: loại trục, các loại lỗ,..Momen xoắn dùng để làm giữ max.Dòng năng lượng điện định nấc có các thông số: 0.75A/ pha, 1.4A/ pha, 2.8A/ phaSố lượng pha: 2p, 5pKích thước của form motor bước: 2 (24mm), 4 (42mm), 6 (60mm) với 9 (85mm).Chiều nhiều năm của motor bước: 3 (33mm), 5 (46.5 - 47mm), 6 (59.5mm) cùng 9 (98mm).2. Các đặc tính cơ bản cần lưu giữ của bộ động cơ bước
a) Đặc tính hễ của hộp động cơ bước
Đặc tính vận tốc – mô men: Đặc tính này được khẳng định bởi hộp động cơ cùng với cỗ điều khiển, cùng nó cũng bị tác động rất nhiều vị loại thiết bị tinh chỉnh và điều khiển mà bạn sử dụng.
Đặc tính mua theo cửa hàng tính cùng tần số bắt đầu: Điều này cho biết thêm tần số khởi động chất nhận được của động cơ sẽ giảm khi thiết lập quán tính của chính nó tăng lên. Những giá trị này còn được biến đổi theo vận tốc xung, nhưng bộ động cơ bước vẫn cấp thiết tuân theo tốc độ xung ví như nó vượt vượt một điểm nhất định, vì vì thế sẽ dẫn đến sự việc đi không đúng bước.
Đặc tính bao gồm độ rung: Khi điều khiển vi bước step motor, động cơ bước quay tuy thế trên thực tế là thực hiện không ít bước có phản hồi, mỗi bước còn được diễn tả bởi những giai đoạn chũm thể, bỏ ra tiết.
b) Đặc tính tĩnh của hộp động cơ bước
Đặc tính mômen với góc: Khi tinh chỉnh step motor, quan hệ giữa nút độ dịch chuyển góc của rôto với mômen sẽ khởi tạo ra lực tác dụng lên trục đụng cơ, trong khi đó, hộp động cơ còn được kích thích vày một mẫu điện định mức.
Độ đúng mực của góc: Trong điều kiện động cơ chạy ko tải, nó sẽ sở hữu được độ đúng chuẩn của góc trong vào tầm khoảng 0,05˚. Độ chính xác góc của bộ động cơ bước thông thường được thể hiện bằng độ chính xác của vị trí dừng.
Độ đúng chuẩn của địa chỉ dừng: vấn đề này thể hiện tại sự biệt lập giữa địa điểm dừng bộ động cơ theo mong muốn và địa chỉ dừng theo thực tế.
Trong điều kiện thực tế của mạch điều khiển và tinh chỉnh động cơ cách 6 dây, động cơ bước luôn tồn trên ma sát. Nếu sở hữu trọng của ma gần kề không đổi thì góc di chuyển sẽ không đổi với tất cả mọi vận động một chiều. Mặc dù nhiên, vào khi hoạt động hai chiều, sai số góc có thể tăng lên vội vàng đôi.
Xem thêm: Truyền Thuyết Về "Người Hà Lan Bay" Và Con Tàu Người Hà Lan Bay
3. Nguyên tắc điều khiển động cơ bước hoạt động như vắt nào
Có thể vận dụng quy tắc bàn tay yêu cầu để tinh chỉnh và điều khiển động cơ cách như sau: vắt bàn tay phải, rồi để bàn tay làm thế nào để cho bốn ngón tay hướng theo chiều của loại điện chạy qua các vòng dây. Lúc đó, ngón tay mẫu choãi ra vẫn chỉ chiều của đường sức từ phía bên trong lòng ống dây.
Nguyên lý hoạt động cơ bản của motor bước: khi chúng ta cấp điện vào vào cuộn dây của stato, cuộn dây này sẽ đóng vai trò đó là một nam châm hút điện. Nó sẽ gây ra lực tác động, trường đoản cú đó có tác dụng quay roto.
Khi điều khiển động cơ cách 5 dây, quá trình đổi khác thứ tự cung cấp điện cho các cuộn dây của stato sẽ để cho trình tự xoay của roto bị cố gắng đổi. Việc biến đổi thứ từ của quy trình chuyển mạch sẽ căn cứ vào mạch năng lượng điện tử.
Có thể vận dụng quy tắc bàn tay bắt buộc để tinh chỉnh và điều khiển động cơ bước
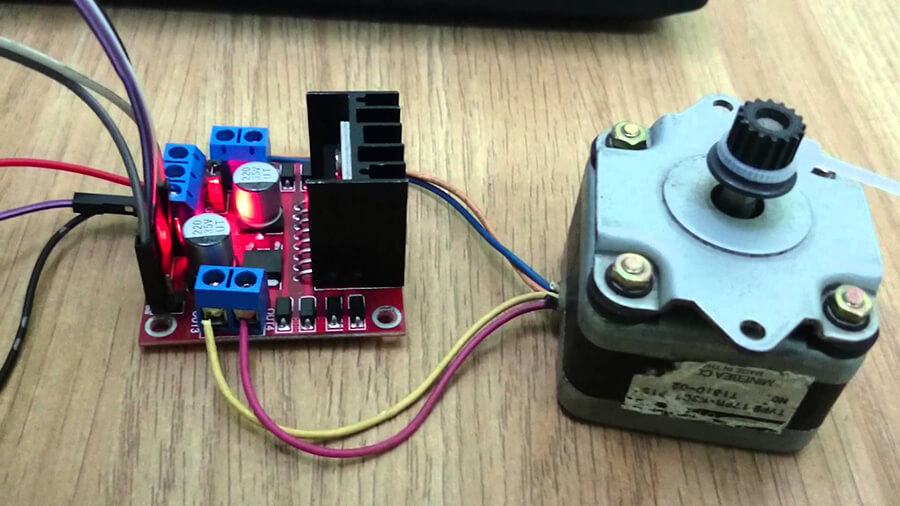
4. Sơ đồ và cách tinh chỉnh động cơ bước
Khi kể đến cách tinh chỉnh động cơ bước, các bạn sẽ thường nói tới cách mạch điều khiển động cơ bước 6 dây, 4 dây hoặc 5 dây,… mặc dù nhiên, sinh sống đây họ sẽ đi tìm kiếm hiểu chi tiết hơn về nền tảng gốc rễ của quá trình điều khiển hộp động cơ bước ra sao, làm như vậy nào, sử dụng cách thức điều khiển gì kết quả nhất?
Cần biết rằng, mỗi một loại động cơ bước thông thường sẽ có các đặc đường khác nhau, vày vậy cách tinh chỉnh của từng loại cũng trở nên khác nhau. Tùy trực thuộc vào sức lực kéo (mô men lực) và tốc độ quay yêu cầu của motor cách mà bạn cũng có thể thiết lập chương trình điều khiển và tinh chỉnh động cơ bước sau đây:
Trường hợp so với những động cơ bước chỉ cần chạy ở tốc độ thấp thì bọn họ sử dụng phương pháp điều khiển bằng cách cấp điện áp trực tiếp. Thiết yếu nội trở trong cuộn dây của hộp động cơ sẽ sản có mặt một loại điện cơ mà ở đó giới hạn dòng năng lượng điện này sẽ phụ thuộc vào điện áp được cấp trực tiếp vào bộ động cơ bước.Trường đúng theo step motor và mạch điều khiển và tinh chỉnh chạy ở tốc độ cao: nếu các bạn muốn tiếp tục sử dụng phương thức cung cấp điện áp thẳng vào hộp động cơ bước thì sức kéo (mô men lực) sẽ ảnh hưởng giảm bớt nghiêm trọng. Cũng chính vì đặc đường cảm của cuộn dây sẽ khởi tạo ra một lực để kìm hãm khả năng, chức năng của dòng điện.Một thực tế cho biết là vào cách điều khiển và tinh chỉnh động cơ bước bằng cách cấp điện trực tiếp sẽ để cho động cơ cùng mạch điều khiển và tinh chỉnh động cơ cách rất nóng.Trường hợp bọn họ cần nâng cao và cải thiện hiệu suất thao tác của mạch điều khiển motor bước ở tốc độ thấp, đồng thời phải tăng vận tốc cao lên thì cần sử dụng phương pháp điều khiển bằng phương pháp băm xung. Khi điều khiển và tinh chỉnh động cơ bước phụ thuộc vào băm xung nhằm bảo trì được tần số không đổi. Tùy thuộc vào nguyên tắc bảo trì dòng điện chạy qua các cuộn dây của động cơ cũng trở thành không đổi mặc dù ở gần như cấp độ. Cách điều khiển và tinh chỉnh này nói một cách khác là cách thức điều khiển theo chiếc điện.Thực tế còn mang đến thấy, cách điều khiển động cơ bước bằng phương pháp băm xung sẽ giúp cho hộp động cơ bước vận động mạnh mẽ hơn, êm rộng và nhất là ít lạnh hơn.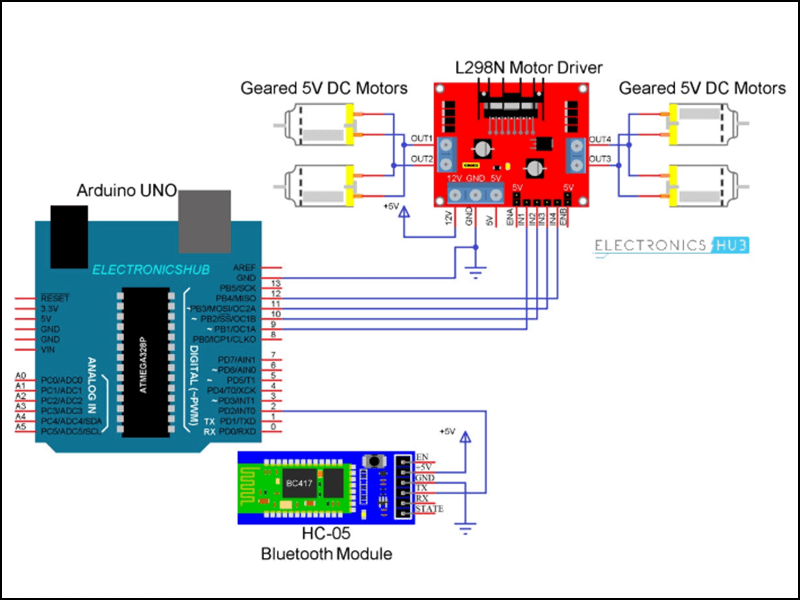
Sơ đồ với cách điều khiển động cơ bước
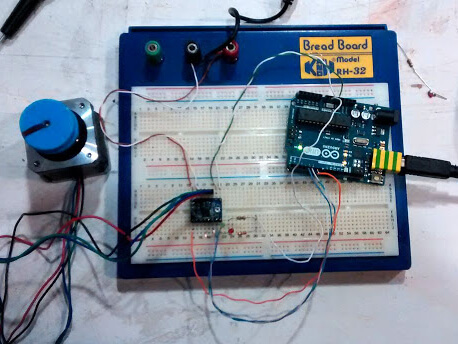
5. Điều khiển hộp động cơ bước dùng Code Arduino và A4988
Để tinh chỉnh và điều khiển động cơ bước Arduino, các bạn cần chuẩn bị:
Động cơ Arduino UNOĐộng cơ NEMA17 Stepper MotorA4988 Driver ModuleTụ năng lượng điện 47µf (giúp bảo đảm an toàn board điều khiển, kị khỏi những xung năng lượng điện áp)Biến trởĐộng cơ cách NEMA17 tất cả 6 dâyĐộng cơ hoạt động ở 12V (Góc lao vào khoảng 1.8 độ và 10 - 40 °C.Sơ vật dụng chân của bộ động cơ bước NEMA 17:
Module tinh chỉnh động cơ cách A4988A4988 chính là driver điều khiển động cơ cách có kích cỡ cực kỳ nhỏ gọn, cung ứng được nhiều chính sách làm việc, mặt khác nó còn điều chỉnh được chiếc điện ra mang đến động cơ, sệt biệt auto ngắt năng lượng điện khi bộ động cơ quá nóng.Công suất điện của ngõ ra: 8 – 35V, 2ACó 5 chế độ bao gồm: 1/2, 1/4, 1/8, 1/16 bướcĐiều chỉnh mẫu điện đi ra bởi chiết ápTự đụng ngắt năng lượng điện khi động cơ bị quá nhiệtCách điều khiển và tinh chỉnh động cơ bước:
Có 5 cơ chế cho chúng ta lựa chọn, nếu khách hàng không ao ước mạch tinh chỉnh động cơ cách chạy rất đầy đủ 200 bước/ vòng. Giỏi nhất, họ nên chạy cho không hề thiếu mà ko cần suy xét 3 chân này, tiếp nối sẽ kiểm soát và điều chỉnh bước của bao gồm động cơ trong khối hệ thống code.
MS1 | MS2 | MS3 | Microstep Resolution |
Low | Low | Low | Full Step |
High | Low | Low | ½ Step (Half Step) |
Low | High | Low | ¼ Step (Quarter Step) |
High | High | Low | 1/8 Step (Eighth Step) |
High | High | High | 1/16 Step (Sixteenth Step) |
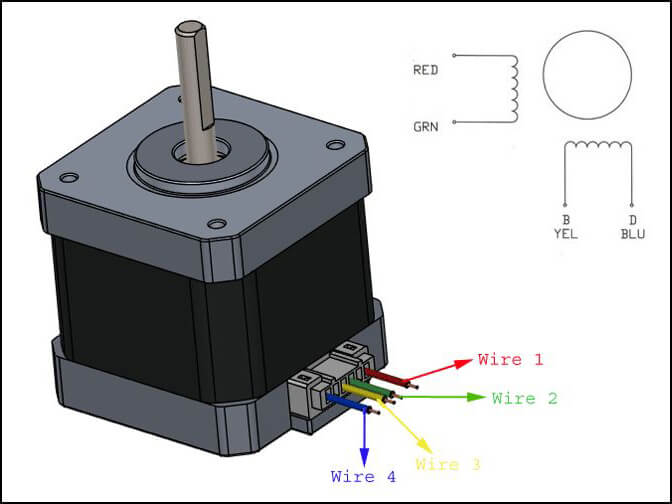
Kết nối theo cặp pha của bộ động cơ bước mang lại 2 cặp 1A - 1B với cặp 2A - 2B
Code:Các bạn hãy thực hiện nạp code này vào Arduino IDE để thử nghiệm (nhưng hãy nhớ thiết đặt cho thư viện bộ động cơ bước nhé)Tiếp theo, trong vòng loop, chúng ta hãy triển khai đọc chân của trở nên trở để chuyển đổi sao đến mức vặn của thay đổi trở rơi vào trong khoảng từ 0 - 500 là được. So sánh giá trị của chúng khi chỉnh biến đổi trở, trường phù hợp nếu nó to hơn giá trị trước đó (vặn theo chiều kim đồng hồ) thì hộp động cơ sẽ nhanh chóng dịch chuyển 10 bước, quay theo chiều kim đồng hồ. Nếu quý hiếm nhận được nhỏ tuổi hơn cực hiếm trước kia (vặn xoay ngược kim đồng hồ) thì bộ động cơ sẽ lập tức di chuyển 10 bước theo hướng ngược chiều kim đồng hồ.Kết luận
Thông qua nội dung bài viết trên đây, cửa hàng chúng tôi đã trình làng đến chúng ta nguyên lý tương tự như cách điều khiển động cơ cách dùng Arduino và A4988 driver. Các bạn cần lựa chọn mua sản phẩm tại add uy tín cũng như chú ý đọc thật kỹ các thông số kỹ thuật của chúng trước khi sử dụng nhé.









{kind=link}