
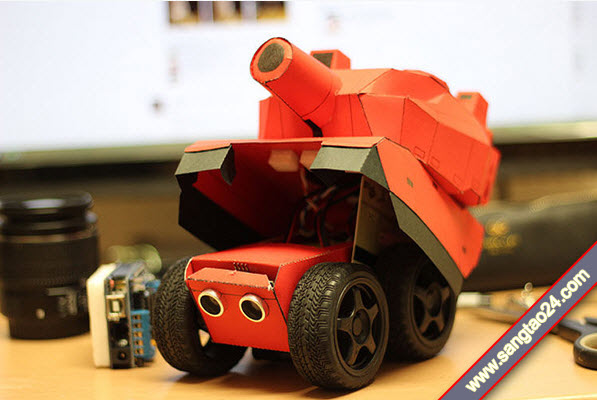
(Sản phẩm sáng tạo) – Trong nội dung bài viết này, Sangtao24 giới thiệu đến các bạn cách làm một mô hình xe tăng bằng giấy có chức năng di gửi và tinh chỉnh từ xa. Mô hình xe tăng được thiết kế bằng giấy (không cần đến những vật dụng đắt tiền như máy cắt laser, phương pháp điện hoặc lắp thêm in 3D) với dựa trên hệ thống mạch Arduino.
Bạn đang xem: Mô hình xe tăng bằng giấy
Sau phía trên là quá trình thực hiện:Bước 1: Tạo/chọn mô hìnhBạn có thể sử dụng điều khoản Google nhằm tìm kiếm một mô hình xe tăng, hoặc có thể vào địa chỉ này. Nếu có thể tự mình xây đắp một quy mô thì chúng ta sử dụng những loại giấy cứng rồi giảm ghép bọn chúng lại.

Bạn rất có thể tự lựa chọn color cho chiếc xe tăng quy mô của mình, hoàn toàn có thể là màu đỏ, màu sắc trắng, màu xanh da trời lá cây. Bạn có thể tải các thành phần của mô hình tại add này.
Bước 2: chọn tính năng
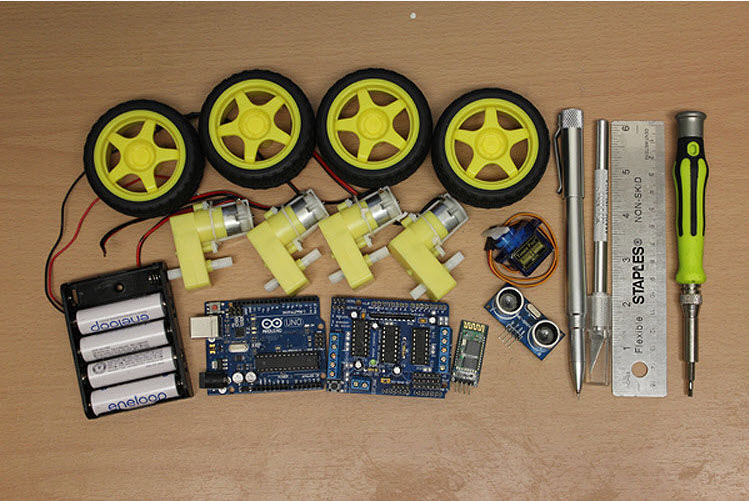
Và các dùng cụ quan trọng cho quá trình chế tạo: kéo giảm giấy, dao, bút, thước, sản phẩm công nghệ hàn sắt.
Xem thêm: Thùy Anh Khoe Khéo Hình Xăm Cô Tiên Tinker Bell, Tinker Bell Tattoos And Designs
Bước 4: xây cất Arduino proptype
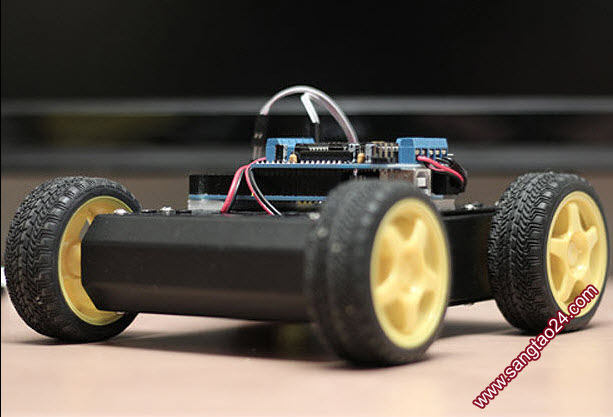
Bước 5: xây dựng Protoype
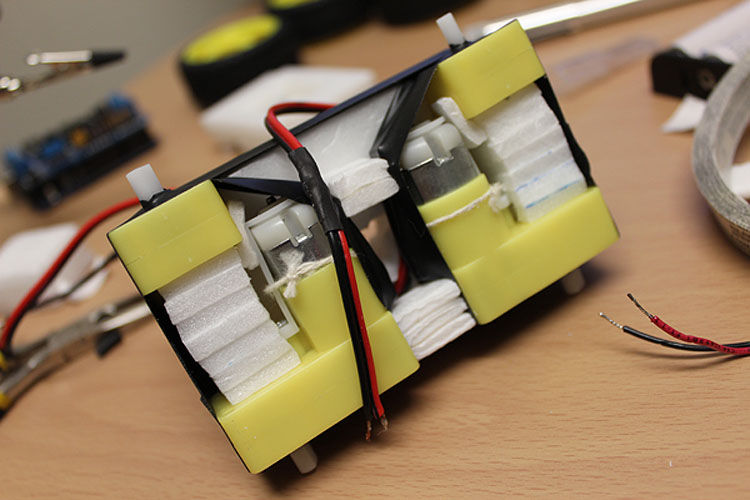
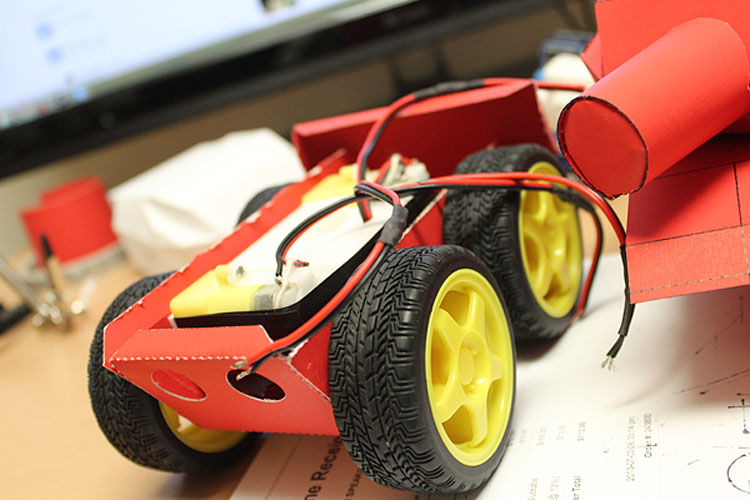
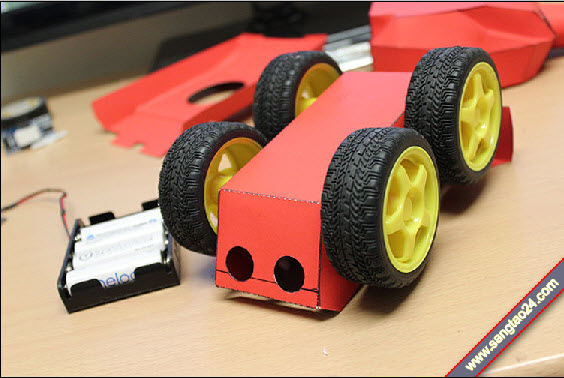
Bước 6: giảm ghép mô hình với phần tử động cơ
Bước 7: có thể thực hiện tại lại các bước trước mang đến những tác dụng khác


Bước 8: đính thêm pin theo mô hình

Bước 10: đính thêm vào phần tử điều khiển


#include#include //Software Serial Port
#include
Servo myservo;int mySpeed;int turretAngle;char val;char prevAction;AF_DCMotor motor_1(1);AF_DCMotor motor_2(2);AF_DCMotor motor_3(3);AF_DCMotor motor_4(4);
#define RED A0#define mix A1#define RxD A5 // This is the sạc that the công nghệ bluetooth (BT_TX) will transmit lớn the Arduino (RxD)#define TxD A4
SoftwareSerial blueToothSerial(RxD,TxD);
int switchVal;bool running;
void setup() Serial.begin(9600); // Allow Serial communication via USB cable khổng lồ computer (if required)pinMode(RxD, INPUT); // setup the Arduino to lớn receive input from the bluetooth shield on Digital pin sạc 6pinMode(TxD, OUTPUT); // setup the Arduino to send data (OUTPUT) to lớn the bluetooth shield on Digital sạc pin 7pinMode(13,OUTPUT); // Use onboard LED if required.pinMode(RED, OUTPUT);pinMode(SET,INPUT_PULLUP);
blueToothSerial.begin(9600);
turretAngle = 90;switchVal = HIGH;
mySpeed = 255;// turn on motorSetSpeed ();myservo.attach(9);Release();
void loop()
int sensorVal = digitalRead(SET);if (sensorVal == LOW)running =! running;digitalWrite(RED, running? HIGH:LOW);delay (400);
if (true)if(blueToothSerial.available())val = blueToothSerial.read();Serial.print(val); // Print the character received to lớn the Serial Monitor (if required)prevAction = val;
if( val == ‘F’ ) //fwdSetSpeed();Forward();else if( val == ‘L’ ) //leftSetSpeed();Left();else if( val == ‘R’ ) //rightSetSpeed();Right();else if( val == ‘B’ ) //reverseSetSpeed();Reverse();else if( val == ‘S’ ) // topRelease();else if( val == ‘G’ ) // NWNorthWest();else if( val == ‘I’ ) // NENorthEast();else if( val == ‘J’ ) // SESouthEast();else if( val == ‘H’ ) // SWSouthWest();else if( val == ‘1’ ) // speedmySpeed = 255/10;else if( val == ‘2’ ) // speedmySpeed = 255/10*2;else if( val == ‘3’ ) // speedmySpeed = 255/10*3;else if( val == ‘4’ ) // tốc độ 1mySpeed = 255/10*4;else if( val == ‘5’ ) // speed 1mySpeed = 255/10*5;else if( val == ‘6’ ) // tốc độ 1mySpeed = 255/10*6;else if( val == ‘7’ ) // tốc độ 1mySpeed = 255/10*7;else if( val == ‘8’ ) // speed 1mySpeed = 255/10*8;else if( val == ‘9’ ) // speed 1mySpeed = 255/10 *9;else if( val == ‘q’ ) // tốc độ 1mySpeed = 255;else if( val == ‘X’ elseif( val == ‘W’ )TurretLeft();else if( val == ‘U’ )TurretRight();elseRelease();
void MoveTurret()if (turretAngle turretAngle = 30;if (turretAngle > 150)turretAngle = 150;myservo.write(turretAngle);
void TurretLeft()turretAngle +=1;MoveTurret();delay(10);
void TurretRight()turretAngle -=1;MoveTurret();delay(10);
void Forward()motor_1.run(FORWARD);motor_2.run(FORWARD);motor_3.run(FORWARD);motor_4.run(FORWARD);
void Reverse()
motor_1.run(BACKWARD);motor_2.run(BACKWARD);motor_3.run(BACKWARD);motor_4.run(BACKWARD);
void Left()motor_1.run(FORWARD);motor_2.run(BACKWARD);motor_3.run(BACKWARD);motor_4.run(FORWARD);
void Right()motor_1.run(BACKWARD);motor_2.run(FORWARD);motor_3.run(FORWARD);motor_4.run(BACKWARD);
void Release()motor_1.run(RELEASE);motor_2.run(RELEASE);motor_3.run(RELEASE);motor_4.run(RELEASE);
void NorthWest()SetSpeedLeft();
void NorthEast()SetSpeedRight();Forward();void SouthEast()SetSpeedRight();Reverse();
void SouthWest()SetSpeedLeft();Reverse();
void SetSpeed()motor_1.setSpeed(mySpeed);motor_2.setSpeed(mySpeed);motor_3.setSpeed(mySpeed);motor_4.setSpeed(mySpeed);
void SetSpeedRight()motor_1.setSpeed(mySpeed/2);motor_2.setSpeed(mySpeed);motor_3.setSpeed(mySpeed);motor_4.setSpeed(mySpeed/2);
void SetSpeedLeft()motor_1.setSpeed(mySpeed);motor_2.setSpeed(mySpeed/2);motor_3.setSpeed(mySpeed/2);motor_4.setSpeed(mySpeed);
Bước 12: Bluetooth


Các chúng ta cũng có thể tham khảo về trình diễn hoạt động của xe tăng mô hình ở phân mục Video.









{kind=link}